Rajat
Mean Squared Error As Maximum Likelihood Estimation
14 MAR 2019 - 10 MINS
Anyone who has read about machine learning will be familiar with the Mean Squared Error (MSE) as loss function in a supervised learning model. If we generalise a bit, and think about this from a Statistics viewpoint, the MSE gives us the measure of the quality of an estimator of a parameter.
But what makes the MSE a ‘good’ measure for this? How do we define ‘good’ in this case? Hopefully this article will answer some of these questions.
Prerequisites
There is no need to understand a great deal about machine learning to make sense of this article, but it would help put things into perspective. Hopefully anyone doing a first year university course in Maths, Statistics or Computer Science shouldn’t find this too much of a stretch to read either.
It may help to be aware of the following:
- Normal Distribution
- Statistical Estimators/Models
- Maxmimum Likelihood Estimation
Defining a Statistical Model for the Data
As we said above, the main use of the MLE is to solve the problem of gauging the quality of an estimator. For this to make sense, we need to define a dataset which we can perform our calculations on.
Consider a dataset which arises from the following statistical models (A):
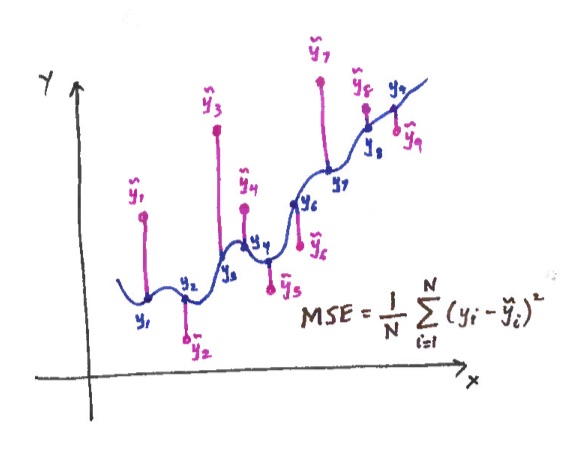
\[Y = g_{\theta}(X) + Z \Rightarrow^{\text{realised as}} y_i = \theta x_i + \epsilon_i\]where \(X\) and \(Y\) are continuous random variables and we can assume the error (\(\epsilon\)) to be produced by an additive white Gaussian model1. This implies that \(Z \sim \mathcal{N}(0, \sigma^2)\) and \(E(Z) = 0\) (B).
From a supervised learning persepctive, we will begin by observing the system which the model represents and collecting a set \(\tau = (x_i, y_i)\) for \(i = 1,...,N\) of training data, where \(x_i\)s are realisations of \(X\) and \(y_i\)s are realisations of \(Y\). The aim of the machine learning problem is to find a \(\hat{\theta}\) which best approximates \(\theta\) on the training data \(\tau\). This is done using a learning algorithm. The learning algorithm will modify \(\hat{\theta}\) based on the magnitude of the error in the approximation. This error will be given by the MSE. Once \(\hat{\theta}\) has best learned \(\tau\) (repeated the above process for all member of the training set \(\tau\) with cross validation etc.), we should have \(\hat{\theta} x_z \approx \theta x_z\), for any \(z > N\)2.
Maximum Likelihood Estimate
We can define a likelihood function \(L\) involving \(\theta\) (C):
\[L(\theta) = \prod_{i=1}^N{f(Y = y_i | X = x_i, \theta)}\]where \(f\) is the conditional probability density function of \(Y\) given input data and the learned parameter.
So by solving for the MLE of \(L\), we are expecting to get \(\hat{\theta}\); the value of \(\theta\) which maximises the likelihood of the observed data \(Y\) occurring.
Once again, from a supervised learning perspective, we can see how the likelihood function is the probability of the observed data (Y) given the parameters of the model and input data (X) = weights which have been learned (\(\theta\)).
How do we get the MSE from the MLE?
We are now at a stage where we can see how the MLE motivates the use of the MSE:
\[\begin{align} f(Y = y | X = x, \theta) & = f(Z + g(X) = y | X = x, \theta) \\ & = f(Z = y - \theta X | X = x) & \text{(sub. from A)}\\ & = f(Z = y - \theta x) & \text{(X = x)}\\ & = \frac{1}{\sigma \sqrt{2\pi}} e^{-\frac{(y-\theta x)^2)}{2\sigma^2}} &\text{(sub. from B)}\\ \end{align}\]By finding the log-likehood function of \(C\) (\(ln L = l\)), we can keep going:
\[\begin{align} l(\theta) & = ln(\prod_{i=1}^N{f(Y = y_i | X = x_i, \theta)}) \\ & = \sum_{i=1}^N{ln(f(Y = y_i | X = x_i, \theta)}) \\ & = \sum_{i=1}^{N}ln(\frac{1}{\sigma \sqrt{2\pi}} e^{-\frac{(y_i-\theta x_i)^2}{2\sigma^2}}) \\ & = \sum_{i=1}^{N}[-\frac{1}{2}ln(2 \pi \sigma^2) - \frac{(y_i-\theta x_i)^2}{2\sigma^2}] \\ & = \sum_{i=1}^{N}[-\frac{1}{2}ln(2 \pi \sigma^2) - \frac{(y_i-\theta x_i)^2}{2\sigma^2}] \\ & = -\frac{N}{2}ln(2 \pi \sigma^2) - \sum_{i=1}^{N}\frac{(y_i-\theta x_i)^2}{2\sigma^2} \\ & = D + F \\ \end{align}\]Since \(D\) has no \(\theta\) term in it, in order to find the \(\hat{\theta}_{} = \theta_{MLE}\), we only need to consider \(F\):
\[\begin{align} \hat{\theta} & = \text{arg}\max\limits_{\theta} (- \sum_{i=1}^{N}\frac{(y_i-\theta x_i)^2}{2\sigma^2}) \\ & = \text{arg}\min\limits_{\theta} (\sum_{i=1}^{N}{(y_i-\theta x_i)^2}) \\ & = \text{arg}\min\limits_{\theta} (\frac{1}{N} \sum_{i=1}^{N}{(y_i-\theta x_i)^2}) \\ & = \text{arg}\min\limits_{\theta} (MSE_{\tau}) \\ \end{align}\]At this stage, by square rooting the function we are trying to minimise, we also end up with the root mean square error. Similarly other loss functions can be derived and their use justified.
Conclusion
Here we can see how by finding the \(\theta\) (weights/model) which minimses the MSE, we are in turn maximising the likelihood of getting our observed data (\(Y\)) from a given input data set (\(X\)). This is not to say that our model will generalise well to unseen input data, however given a sufficiently large dataset (and many other factors of course…) we should see an improved out of sample prediction quality also. This also highlights why the MSE (and RMSE etc.) is a mathematically logically loss function to choose.
Further Reading + References:
- The Elements of Statistical Learning (ML Bible) - Chapter 2.6
- Imperial College London, Data Science Society - Academy of AI Notes, Session 6 Slides 8-14
- Eugine Kang’s Medium Article - Maximum Likelihood Estimation
- Will Kurt’s Blog - A Deeper look at Mean Squared Error
-
We arrive at this assumption through Occam’s Razor, which essentially states that a solution with the fewest assumptions is more likely to be correct that other solutions. ↩
-
Given an input \(x_z\) which the model has not learned (been trained on), an accurate \(y_z\) should be predicted. ↩
Did you enjoy this post?
If you did, check out my Github repo - I've got some cool projects on there. I also post these articles on Medium, so you could get notifications when they get posted if you download the Medium app and subscribe to my feed. Alternatively you could even subscribe to my feed on this site and get notified by my updates here. Add me on social media too. It's quite possible that you didn't like this article. I'd love some feedback!